Learning Smooth Humanoid Locomotion through Lipschitz-Constrained Policies
IEEE International Conference on Intelligent Robots and Systems (IROS 2025)
Zixuan Chen* (1)Xialin He* (2)Yen-Jen Wang* (3)Qiayuan Liao (3)Yanjie Ze (4)Zhongyu Li (3)S. Shankar Sastry (3)Jiajun Wu (4)Koushil Sreenath (3)Saurabh Gupta (2)Xue Bin Peng (1, 5)
(1) Simon Fraser University(2) UIUC 3UC Berkeley(4) Stanford University(5) NVIDIA
*Equal contribution.
Abstract
Reinforcement learning combined with sim-to-real transfer offers a general
framework for developing locomotion controllers for legged robots. To
facilitate successful deployment in the real world, smoothing techniques,
such as low-pass filters and smoothness rewards, are often employed to
develop policies with smooth behaviors. However, because these techniques
are non-differentiable and usually require tedious tuning of a large set
of hyperparameters, they tend to require extensive manual tuning for each
robotic platform. To address this challenge and establish a general
technique for enforcing smooth behaviors, we propose a simple and effective
method that imposes a Lipschitz constraint on a learned policy, which we
refer to as Lipschitz-Constrained Policies (LCP). We show that the
Lipschitz constraint can be implemented in the form of a gradient penalty,
which provides a differentiable objective that can be easily incorporated
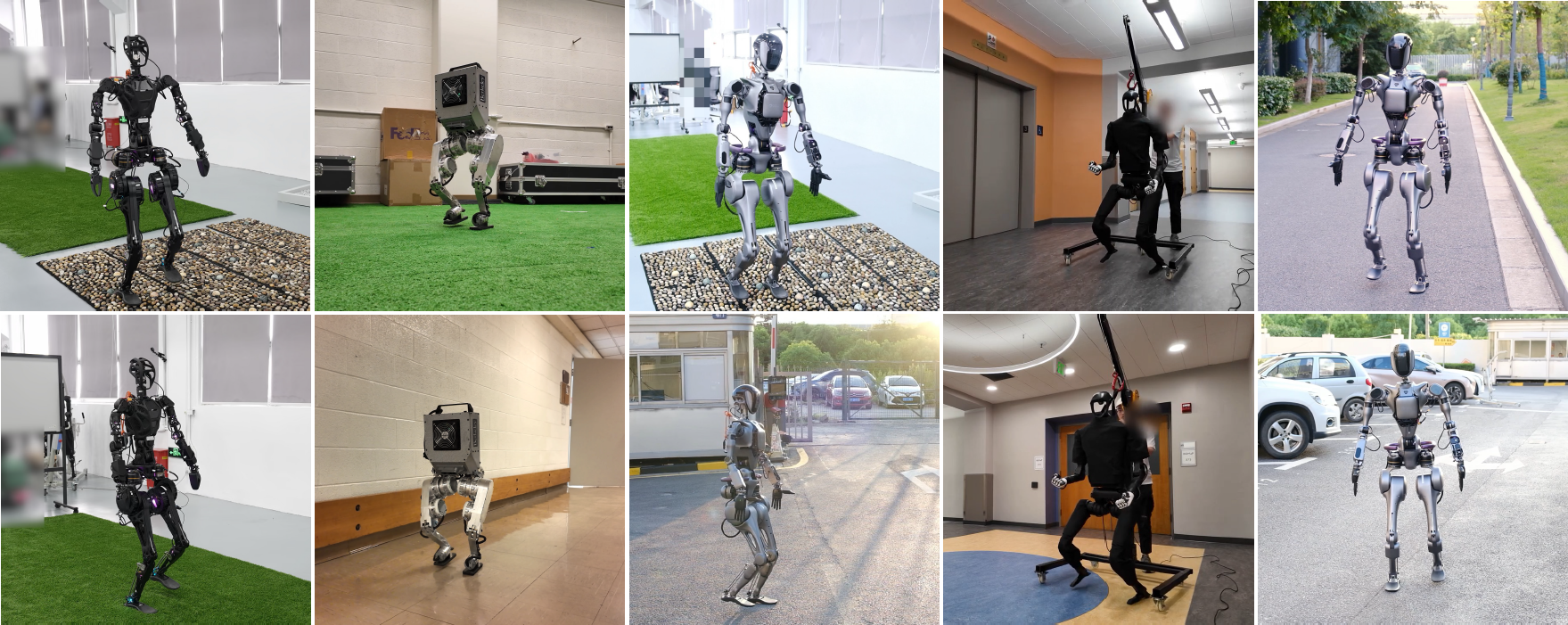
with automatic differentiation frameworks. We demonstrate that LCP
effectively replaces the need for smoothing rewards or low-pass filters
and can be easily integrated into training frameworks for many distinct
humanoid robots. We extensively evaluate LCP in both simulation and
real-world humanoid robots, producing smooth and robust locomotion
controllers.
@article{
chen2025lcp,
title = {Learning Smooth Humanoid Locomotion through Lipschitz-Constrained Policies},
author = {Zixuan Chen and Xialin He and Yen-Jen Wang and Qiayuan Liao and Yanjie Ze and Zhongyu Li and S. Shankar Sastry and Jiajun Wu and Koushil Sreenath and Saurabh Gupta and Xue Bin Peng},
journal={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2025}
}